


自2004年《農(nóng)業(yè)機(jī)械化促進(jìn)法》實施以來,農(nóng)業(yè)機(jī)械行業(yè)發(fā)展迅速,基本解決了產(chǎn)量不足的問題,也帶來了質(zhì)量水平不高,有效供給不足的矛 盾。作為動力機(jī)械,拖拉機(jī)企業(yè)較多,同質(zhì)化嚴(yán)重,且技術(shù)水平依然處于發(fā)達(dá)國家20世紀(jì)末的水平,發(fā)展步伐緩慢。為此,有必要開展國內(nèi)外拖拉機(jī)先 進(jìn)技術(shù)及我國拖拉機(jī)技術(shù)現(xiàn)狀的研究,準(zhǔn)確把握國外先進(jìn)拖拉機(jī)的技術(shù)、了 解我國拖拉機(jī)的發(fā)展水平、意識到存在的差距,為我國拖拉機(jī)技術(shù)的研究提 供參考,明確發(fā)展發(fā)現(xiàn)及技術(shù)路線,不斷提高我國拖拉機(jī)的技術(shù)水平,同時 也為其他農(nóng)業(yè)機(jī)械的發(fā)展提供參考。
一、先進(jìn)技術(shù)介紹
拖拉機(jī)屬于動力機(jī)械,作業(yè)高質(zhì)高效是其根本發(fā)展方向。智能化、信息化、多功能是先進(jìn)拖拉機(jī)體的主要特點,具體表現(xiàn)在電子控制技術(shù)、液壓技術(shù)、傳感器、控制策略、制造工藝等方面的應(yīng)用。
1.1液壓技術(shù)
拖拉機(jī)上的液壓系統(tǒng)主要有液壓懸掛系統(tǒng)、液壓轉(zhuǎn)向系統(tǒng)、液壓傳動系系統(tǒng)、液壓潤滑系統(tǒng)及部 分液壓控制的操控系統(tǒng)等,具體應(yīng)用有液壓提升、液壓輸出、液壓制動、液壓操控差速鎖、液壓離合器(PTO、變速箱)、液壓減震駕駛室等,主要應(yīng)用如表1 所示。隨著機(jī)電液一體化技術(shù)的發(fā)展,液壓技術(shù)的應(yīng)用水平直接決定了拖拉機(jī)的智能化水平,比如說電控液壓懸掛技術(shù)、電控液壓轉(zhuǎn)向或線控液壓轉(zhuǎn)向技術(shù)、液壓懸浮減震技術(shù)等,這些技術(shù)在國外已 經(jīng)是較為成熟的技術(shù)。
1.2 電動拖拉機(jī)
電動拖拉機(jī)已有百余年的發(fā)展歷史,近些年隨著電池的性能得到提高,電動拖拉機(jī)的優(yōu)點逐漸明顯。與傳統(tǒng)的燃油拖拉機(jī)相比,其扭矩較大,且可以實現(xiàn)無級變速,具有高效、底噪、低污染等優(yōu)點。但針對電動拖拉機(jī)的能源管理技術(shù)、電機(jī)技術(shù)、控制技術(shù)等與拖拉機(jī)的滿足惡劣環(huán)境工作、續(xù)航時長高、安全性好等要求還有差距,其應(yīng)用范圍仍然較窄。
2017年,在法國SIMA展上,約翰迪爾發(fā)布了其開發(fā)的純電動拖拉機(jī):SESAM(SustainableEnergySupplyforAgriculturalMachines),該電動拖拉機(jī)已經(jīng)完成田間作業(yè)試驗,功率為260 kW,可持續(xù)工作4 h或滿足55 km的運輸作業(yè)。以中國農(nóng)業(yè)大學(xué)、南京農(nóng)業(yè)大學(xué)為主的高校就電動拖拉機(jī)構(gòu)、驅(qū)動系統(tǒng)、CAN總線傳輸、控制策略、試驗臺架進(jìn)行了理論分析、仿真試驗、臺架試驗,取得了一定的研究成果,部分學(xué)者研究并試制了果園用小功率的電動拖拉機(jī)樣機(jī),基本滿足果園旋耕、中耕、施肥等作業(yè)要求,但是中大功率的電動拖拉機(jī)仍無成熟樣機(jī)。2012年,中國拖拉機(jī)公司與美國公司合作開展電動拖拉機(jī)相關(guān)技術(shù)的研究,但至今未見關(guān)于推出樣機(jī)的相關(guān)信息。2018年由國家農(nóng)機(jī)裝備創(chuàng)新中心研發(fā)的以自主知識產(chǎn)權(quán)的電控系統(tǒng)為核心,集成應(yīng)用北斗導(dǎo)航、毫米波雷達(dá)、視覺等無人駕駛系統(tǒng)的國內(nèi)第一臺純電動無人駕駛拖拉機(jī)進(jìn)入人們視線,并已開始田間試驗階段。
1. 3 電控液壓懸掛
懸掛是拖拉機(jī)的關(guān)鍵組成部分,是實現(xiàn)拖拉機(jī)耕地、播種、施肥等作業(yè)功能的基本配置。早期,作業(yè)機(jī)具多以繩索或鏈條連接,直至19世紀(jì)30年代出現(xiàn)了液壓三點懸掛裝置,到現(xiàn)在拖拉機(jī)上已基本標(biāo)配液壓懸掛系統(tǒng)。傳統(tǒng)的液壓懸掛采用機(jī)械液壓方式實現(xiàn)反饋控制,隨著傳感器技術(shù)的發(fā)展,反饋信號可以通過相應(yīng)的傳感器來獲取,加上電子控制技術(shù)的應(yīng)用,電控液壓懸掛技術(shù)逐漸成熟。電控液壓懸掛是指,數(shù)據(jù)采集系統(tǒng)通過力、位置、轉(zhuǎn)速等傳感器獲取拖拉機(jī)耕作時的耕作阻力、耕作深度、拖拉機(jī)滑轉(zhuǎn)率,并提高處理器輸出指令進(jìn)而控制液壓油缸的伸縮實現(xiàn)控制懸掛的提升與下降,保證懸掛最佳的工作狀態(tài)或調(diào)整到預(yù)設(shè)的耕作位置,實現(xiàn)耕作深度的自動控制,現(xiàn)常用的液壓懸掛控制方式有力、位綜合控制或者力、位、滑轉(zhuǎn)率綜合控制。
電控液壓懸掛控制系統(tǒng)(EHR)技術(shù)較為成熟,在國外先進(jìn)企業(yè)得到了廣泛應(yīng)用,該系統(tǒng)在實現(xiàn)耕作深度自動控制的基礎(chǔ)上還可以實現(xiàn)故障診斷、主動減震、擴(kuò)展控制、前提升器高度控制、接地壓力控制等功能。試驗表明,該系統(tǒng)控制誤差較小,精度較高。中國農(nóng)業(yè)大學(xué)、南京農(nóng)業(yè)大學(xué)、江蘇大學(xué)等高校就自動耕深控制技術(shù)的智能控制算法、CAN總線傳輸技術(shù)、多參數(shù)調(diào)節(jié)技術(shù)等進(jìn)行了深入的研究,取得了豐富的理論成果,制作了樣機(jī),取得了一定的研究成果。部分公司也推出了較為成熟的產(chǎn)品,其中悅達(dá)智能農(nóng)業(yè)裝備有限公司在綜合市場與成本的前提下,研制了新型的適合中國國情的力位綜合控制的電控液壓懸掛系統(tǒng)。
1.4導(dǎo)航駕駛系統(tǒng)
拖拉機(jī)自動導(dǎo)航駕駛具有直線行駛偏差小、滿足夜間作業(yè)、降低駕駛員疲勞強(qiáng)度、減少人力資源、提高作業(yè)效率等優(yōu)點,是精準(zhǔn)農(nóng)業(yè)的基礎(chǔ)。實現(xiàn)拖拉機(jī)導(dǎo)航的方法有多種,包括衛(wèi)星導(dǎo)航、視覺導(dǎo)航、電磁導(dǎo)航等,現(xiàn)在拖拉機(jī)上應(yīng)用較多的就是衛(wèi)星導(dǎo)航方法,自動導(dǎo)航駕駛技術(shù)的關(guān)鍵在于環(huán)境感知技術(shù)、地圖構(gòu)建技術(shù)、路徑規(guī)劃技術(shù)、轉(zhuǎn)向控制技術(shù)等。根據(jù)駕駛的自動程度,拖拉機(jī)導(dǎo)航駕駛系統(tǒng)又可以分為輔助駕駛系統(tǒng)、自動駕駛系統(tǒng)、無人駕駛系統(tǒng),各有優(yōu)缺點,具體分類如表2所示。國外先進(jìn)拖拉機(jī)企業(yè)現(xiàn)已有成熟的導(dǎo)航產(chǎn)品,且已實現(xiàn)模塊化,移植性較好,通過參數(shù)的調(diào)整設(shè)置,可以靈活的應(yīng)用到不同的拖拉機(jī)上。
上世紀(jì)70年代美國發(fā)明GPS以來,其在農(nóng)業(yè)上的應(yīng)用范圍、方式得到不斷拓展。如今北斗導(dǎo)航系統(tǒng)工作衛(wèi)星已達(dá)33顆,服務(wù)性能不斷提高,民用范圍逐漸擴(kuò)大,基于北斗導(dǎo)航的自動駕駛拖拉機(jī)也在研發(fā)試用當(dāng)中。中國農(nóng)業(yè)大學(xué)、南京農(nóng)業(yè)大學(xué)、華中農(nóng)業(yè)大學(xué)、重慶理工大學(xué)等高校就自動導(dǎo)航轉(zhuǎn)向控制系統(tǒng)、控制決策方法、障礙物識別等關(guān)鍵技術(shù)進(jìn)行了研究試驗,取得了豐富的理論成果。部分企業(yè)也推出了自動導(dǎo)航拖拉機(jī),雷沃重工股份有限公司、中國一拖集團(tuán)有限公司均推出了自主研發(fā)的自動導(dǎo)航拖拉機(jī),以雷沃重工為例,其自動導(dǎo)航拖拉機(jī)可實現(xiàn)定位、導(dǎo)航、機(jī)具自動調(diào)節(jié)等功能,控制精度高,可滿足多種田間作業(yè)。
1.5駕駛室技術(shù)
傳統(tǒng)的拖拉機(jī)駕駛室較為簡易,以遮風(fēng)擋雨為基本功能,如今拖拉機(jī)駕駛室在保證視野的基礎(chǔ)上更加注重安全性、舒適性、可靠性,更加智能化、信息化,可完成拖拉機(jī)的大部分信息顯示記錄、駕駛操控、機(jī)具控制、遠(yuǎn)程通訊等功能。綜合來看,其先進(jìn)性主要體現(xiàn)在如下幾個方面。
安全性是拖拉機(jī)駕駛室的基本要求,同樣也是先進(jìn)性的體現(xiàn)。作為防護(hù)裝置,拖拉機(jī)駕駛室須滿足壓垮、側(cè)翻等強(qiáng)度要求,須有滿足逃生的緊急出口;視野需要滿足標(biāo)準(zhǔn)要求,后視鏡位置須合理,保證視野良好,滿足安全駕駛,可選裝攝像頭及輔助顯示系統(tǒng);須安裝工作燈滿足夜間安全作業(yè)及照明需求;駕駛座須安裝安全帶;前擋風(fēng)玻璃應(yīng)為安全玻璃;內(nèi)飾材料的阻燃性能需滿足標(biāo)準(zhǔn)要求。
駕駛舒適性上,先進(jìn)的技術(shù)主要有:在駕駛室與車架的連接處加裝減振懸架、減震彈簧或阻尼裝置,降低整機(jī)的振動水平;方向盤及操縱桿件避振安裝,減少整機(jī)振動對手臂的沖擊,提高駕駛方向的準(zhǔn)確性;安裝冷暖空調(diào),可實現(xiàn)溫度、風(fēng)速的控制;密封駕駛室,可滿足降低噪聲,隔斷沙塵、農(nóng)藥的要求;減震駕駛座椅,可自主調(diào)整座椅的阻尼程度,降低整機(jī)振動對駕駛員身體直接沖擊。
操控人機(jī)工程上,先進(jìn)性主要體現(xiàn)在:操縱按鈕、桿件、界面分類集中合理布置,方便駕駛員操縱使用;信息顯示儀表、警示燈布置簡潔明了,操作簡單、信息簡明;階梯扶手滿足標(biāo)準(zhǔn)要求的同時充分考慮到駕駛員活動自如、操作方便的要求;設(shè)置有副駕駛座、杯托、文件柜、音響系統(tǒng)、點煙器、遮陽簾等,滿足駕駛員多元需求。
智能化方面,先進(jìn)性主要表現(xiàn)在駕駛室內(nèi)實現(xiàn)拖拉機(jī)的大部分智能控制。控制按鈕、界面、桿件,顯示界面等已經(jīng)是駕駛室的重要組成部分,且多數(shù)先進(jìn)駕駛室將部分信息顯示界面設(shè)置于右前立柱,基本已經(jīng)融為一體。部分拖拉機(jī)將大部分操作按鍵設(shè)置于與駕駛座為一體的扶手上,與座椅同步轉(zhuǎn)動,其基本上可以實現(xiàn)大部分的拖拉機(jī)功能的操作,十分智能、簡便。
以 CASE Magnum 系列拖拉機(jī)駕駛室為例,其配置減震懸架,可以隔離底盤振動,保證駕駛平穩(wěn);空氣懸浮系統(tǒng)的轉(zhuǎn)椅,可以40°右轉(zhuǎn),實 現(xiàn)180°的全方位視野,駕駛室的控件也位于右上方,一切都在視野之內(nèi)。
裝有 MultiControl扶手控制臺與ICP直觀控制面板,可選 AFSPro700TM 觸屏監(jiān)視器,可隨駕駛座同步轉(zhuǎn)動,所有重要操作都集成在一個簡單的控制器上,可以實現(xiàn)速度選擇、換向、油門、地頭管理控制、電子遙控閥、后端掛接控制、PTO、操縱桿等功能。配備智能空調(diào),可以實現(xiàn)溫度自動控制;方向盤可以傾斜并調(diào)節(jié)高度;右前立柱設(shè)有顯示與監(jiān)控面板,顯示清晰、簡潔、易讀,綜合性能監(jiān)視器可提供額外的反饋,包括拖拉機(jī)系統(tǒng)狀態(tài)、滑轉(zhuǎn)率、已耕作面積和維護(hù)提醒等,如果存在任何警告信息,顯示器會向駕駛員報警,并在必要時自動關(guān)閉發(fā)動機(jī)以保護(hù)機(jī)器。
1.6動力換擋
動力換擋是拖拉機(jī)上先進(jìn)的動力傳動方案,其是機(jī)電液一體化技術(shù)在拖拉機(jī)的典型應(yīng)用,其主要是利用電控液壓離合器、制動器,在不斷開動力傳動的前提下實現(xiàn)快速換擋。動力換擋技術(shù)克服了傳統(tǒng)傳動系統(tǒng)停頓換擋、動力中斷的缺點,更加方便快捷,提高了工作效率。動力換擋技術(shù)已有60余年的歷史,上世紀(jì)50年代末,動力換擋變速箱首次應(yīng)用于卡特彼勒履帶拖拉機(jī)上,20世紀(jì)90年代,該技術(shù)在普遍應(yīng)用在大功率或重型拖拉機(jī)上。動力換擋變速箱主要由機(jī)械傳動系統(tǒng)、液壓控制系統(tǒng)和電子控制系統(tǒng)三部分組成。技術(shù)難點主要在液壓技術(shù)及電子控制策略上。如今國外 先 進(jìn) 農(nóng) 機(jī) 企 業(yè) 該 技 術(shù) 已 經(jīng) 成 熟,如 Case、JohnDeere、Claas、Challenger、Fendt、MasseyFerguson、Deutz-Fahr等,我國拖拉機(jī)企業(yè)在收購國外公司的基礎(chǔ)上開發(fā)出了自主的動力換擋技術(shù),部分企業(yè)在積極的研發(fā)自主知識產(chǎn)權(quán)的動力換擋技術(shù),即將開展型式試驗。
1.7無極變速
無極變速是指速比可連續(xù)變換。拖拉機(jī)作業(yè)環(huán)境惡劣,如果要達(dá)到較高的動力性及經(jīng)濟(jì)性,便需要根據(jù)作業(yè)負(fù)荷或速度實時調(diào)整傳動系的傳動比,使發(fā)動機(jī)工作在傳動效率較高區(qū)間,經(jīng)濟(jì)性較好,是拖拉機(jī)傳動技術(shù)發(fā)展的重要方向。
無級變速按傳動方式可以分為機(jī)械傳動、流體傳動、電氣傳動、液壓機(jī)械雙流傳動等。功率分流式無級變速傳動系已普遍使用,根據(jù)德國農(nóng)業(yè)協(xié)會試驗研究,該方式較動力換擋變速箱作業(yè)燃油消耗率更低。
無級變速種類主要分為四類,具體情況如表3所示。
在日本、韓國等國家,其作業(yè)田塊面積不大,拖拉機(jī)以中小功率為主,其對大功率、大扭矩要求不高,主要采用靜液壓變速的無級變速。
如今,ACGO、CNH、JohnDeer、Claas、SameDeutz-Fahr等公司均推出了無級變速技術(shù),技術(shù)路線略有區(qū)別。中國僅有一拖東方紅LW4004無級變速重型拖拉機(jī)以及常州東風(fēng)農(nóng)機(jī)集團(tuán)有限公司的鏈條傳動的無級變速拖拉機(jī),且東方紅 LW4004并沒有批量生產(chǎn)銷售,東風(fēng)仍處于型式試驗階段。
1.8 電功率
隨著拖拉機(jī)智能化、大型化及作業(yè)機(jī)械復(fù)式化的發(fā)展,傳統(tǒng)的動力輸出軸和液壓輸出已經(jīng)不能完全滿足動力供應(yīng)的需求。在2007年,JohnDeere公司發(fā)布了提供電功率的拖拉機(jī),2009年,Belarus公司也向市場推出了一臺配置電功率輸出的拖拉機(jī)。近幾年,ZF(ZFFriedrichshafenAG)公司研制出成熟的集成發(fā)電機(jī)解決方案:TERRA+,該系統(tǒng)最大可以提供70kW的電功率,更加節(jié)能高效。
1.9 拖拉機(jī)ABS
制動防抱死系統(tǒng)(ABS:AntilockBrakingSystem)是一種車輛剎車制動力控制系統(tǒng),可防止制動時車輪抱死,保證車輛整機(jī)可轉(zhuǎn)向性。如今,拖拉機(jī)最大行駛速度較高(在中國拖拉機(jī)最高速度限制在40km/h,但一些國家高于此速度),尤其是掛車運輸或道路轉(zhuǎn)運行駛時,傳統(tǒng)制動系統(tǒng)便不能保證高速制動的安全,因此ABS制動系統(tǒng)有必要應(yīng)用到高速拖拉機(jī)或?qū)I(yè)拖拉機(jī)上,滿足高速行駛時的制定安全性。國外先進(jìn)企業(yè)如 New Holland、JohnDeere、Deutz-Fahr等企業(yè)均已具備拖拉機(jī)ABS制動技術(shù),且已可以應(yīng)用到拖拉機(jī)上,我國在拖拉機(jī)ABS技術(shù)上基本沒有開展研究。
如圖1為John Deere的拖拉機(jī)ABS系統(tǒng)示意圖。其主要由輪速傳感器、制動單元、液壓系統(tǒng)(圖中未畫出)、控制單元(圖中未畫出)等組成,其可以根據(jù)各輪轉(zhuǎn)速、各制動單元液壓壓力控制控制閥的開閉,進(jìn)而控制各輪的制動力,在防止車輪抱死的情況下實現(xiàn)車輪的最大減速度。
1.10 先進(jìn)耕作系統(tǒng)
先進(jìn)耕作系統(tǒng)是指在電子控制、液壓控制、傳感器、數(shù)據(jù)傳輸?shù)然A(chǔ)技術(shù)的基礎(chǔ)上,集成物聯(lián)網(wǎng)、衛(wèi)星導(dǎo)航駕駛、能源管理、電控液壓懸掛等拖拉機(jī)技術(shù),聯(lián)接人、拖拉機(jī)、土地、控制中心(包括基于手機(jī)的app軟件和基于電腦的控制中心),實現(xiàn)拖拉機(jī)各項功能的全面、精確、智能控制,其是基于拖拉機(jī)的精確農(nóng)業(yè),是拖拉機(jī)技術(shù)的高級階段。世界先進(jìn)拖拉機(jī)企業(yè)在先進(jìn)耕作系統(tǒng)的研究起步較早,已有十余年的歷史,由于其基礎(chǔ)技術(shù)與各項集成技術(shù)已經(jīng)較為成熟,現(xiàn)階段先進(jìn)耕作系統(tǒng)已經(jīng)成功走向市場,代表了前沿的拖拉機(jī)技術(shù)。CaseIH耕作系統(tǒng)(AFSTM)為僅為典型的先進(jìn)耕作系統(tǒng),該系統(tǒng)主要由個模塊組成,分別是車輛控制、車輛導(dǎo)航、AFSTM農(nóng)場管理軟件、AFSCNO-NECTTM遠(yuǎn)程信息處理,各模塊分工明確,功能強(qiáng)大,可實現(xiàn)對整機(jī)的控制、自動導(dǎo)航駕駛、信息顯示存儲等基礎(chǔ)功能,同時還可以實現(xiàn)農(nóng)田信息、作業(yè)情況、產(chǎn)量信息等的記錄,并在此數(shù)據(jù)的基礎(chǔ)上進(jìn)行分析統(tǒng)計,幫助農(nóng)場主或機(jī)手進(jìn)行田間管理作業(yè)的正確決策,是物聯(lián)網(wǎng)的具體應(yīng)用,是精確農(nóng)業(yè)的載體。
二、對比分析
通過以上分析并進(jìn)一步查閱文獻(xiàn),在掌握國內(nèi)外主流拖拉機(jī)產(chǎn)品技術(shù)特點的基礎(chǔ)上,分別就發(fā)動機(jī)、底盤、駕駛室與車身、工作裝置等部分分別就國內(nèi)外拖拉機(jī)先進(jìn)水平的拖拉機(jī)技術(shù)特點進(jìn)行的總結(jié)概括,列出國內(nèi)外主流拖拉機(jī)產(chǎn)品先進(jìn)技術(shù)對比情況,如表4所示。
三、總結(jié)分析
經(jīng)過上述先進(jìn)技術(shù)分析以及國內(nèi)外拖拉機(jī)主流技術(shù)對比,可以發(fā)現(xiàn)我國拖拉機(jī)技術(shù)水平較國外先進(jìn)企業(yè)差距較大,主要在智能化與信息化上面,具體表現(xiàn)在智能控制策略、機(jī)電液一體化技術(shù)、制造工藝、人機(jī)工程等四個方面。
1)智能控制策略。智能控制策略是智能化、信息化拖拉機(jī)的核心,如自動導(dǎo)航駕駛、電控液壓懸掛、動力換擋、無級變速等技術(shù),其關(guān)鍵也在于智能控制策略。國外先進(jìn)企業(yè)在上述先進(jìn)技術(shù)上均具有成熟的智能控制策略,如ACGO的無級變速器、CaseIH先進(jìn)耕作系統(tǒng)(AFSTM)。我國部分高校及科研院所針對動力換擋、自動導(dǎo)航等技術(shù)進(jìn)行了豐富的控制策略理論研究及臺架試驗,如基于模糊控制算法的耕深控制技術(shù)、基于模糊神經(jīng)網(wǎng)絡(luò)的直線行走控制策略、無級變速拖拉機(jī)智能變速規(guī)律等,但是多處于研究階段,應(yīng)用水平較低。
2)機(jī)電液一體化技術(shù)。我國拖拉機(jī)機(jī)電液一體化技術(shù)水平較差,從全液壓轉(zhuǎn)向液壓懸掛、動力換擋、無級變速、ABS到自動導(dǎo)航等技術(shù)均需要機(jī)械、電控、液壓等技術(shù)的有效結(jié)合,我國液壓技術(shù)相對落后,尤其是液壓閥可靠性有待提高。國外先進(jìn)拖拉機(jī),電子控制技術(shù)、液壓技術(shù)、控制策略運用成熟,引領(lǐng)拖拉機(jī)技術(shù)的發(fā)展,整體來看,我國拖拉機(jī)機(jī)電液一體化技術(shù)與國外仍存在較大差距。
3)制造工藝。我國拖拉機(jī)企業(yè)眾多,且多數(shù)為中小企業(yè),部分還是以組裝為主的家庭作坊式工廠,且我國農(nóng)機(jī)工業(yè)基礎(chǔ)較差,生產(chǎn)過程控制水平較低,對質(zhì)量體系要求不高,工藝要求低,導(dǎo)致拖拉機(jī)整體裝備質(zhì)量不高,直接結(jié)果就是振動、噪聲水平高,壽命下降,可靠性有待提高,維護(hù)成本高。
4)人機(jī)工程。我國拖拉機(jī)人機(jī)工程仍處于起步階段,國外先進(jìn)拖拉機(jī)企業(yè)比較注重人機(jī)工程,尤其在駕駛室上面,可以協(xié)調(diào)操作顯示與安全性、舒適性于一體,振動、噪聲水平較小,駕駛員可以方面操作,大大降低勞動強(qiáng)度,提高了舒適性。
我國農(nóng)業(yè)機(jī)械相關(guān)高校、科研院所或者拖拉機(jī)企業(yè)應(yīng)該以《農(nóng)機(jī)裝備發(fā)展行動方案(2016—2025)》的落實為契機(jī),以《關(guān)于加快推進(jìn)農(nóng)業(yè)機(jī)械化和農(nóng)機(jī)裝備產(chǎn)業(yè)轉(zhuǎn)型升級的指導(dǎo)意見》為指導(dǎo),充分把握國家對新型高效農(nóng)業(yè)機(jī)械,尤其是拖拉機(jī)提出的具體發(fā)展要求,以培養(yǎng)優(yōu)質(zhì)人才、提高科研投入、提升制造工藝、攻克關(guān)鍵技術(shù)為發(fā)展路線,加強(qiáng)關(guān)鍵零部件的研發(fā)力度,如傳感器、液壓閥、控制器等,集中精力攻克關(guān)鍵技術(shù)如無級變速技術(shù)、智能控制策略,進(jìn)一步關(guān)注拖拉機(jī)人機(jī)工程,改善拖拉機(jī)的可靠性與舒適性,提高智能化、信息化水平,不斷提升我國拖拉機(jī)技術(shù)水平。
(來源:中國農(nóng)機(jī)工業(yè)援引拖拉機(jī)與農(nóng)用運輸車雜志)
一、先進(jìn)技術(shù)介紹
拖拉機(jī)屬于動力機(jī)械,作業(yè)高質(zhì)高效是其根本發(fā)展方向。智能化、信息化、多功能是先進(jìn)拖拉機(jī)體的主要特點,具體表現(xiàn)在電子控制技術(shù)、液壓技術(shù)、傳感器、控制策略、制造工藝等方面的應(yīng)用。
1.1液壓技術(shù)
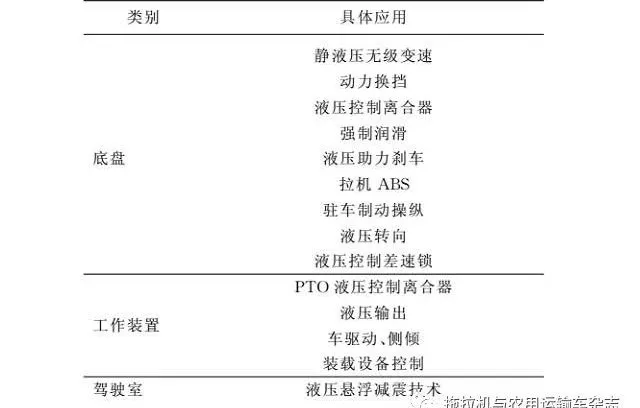
拖拉機(jī)上的液壓系統(tǒng)主要有液壓懸掛系統(tǒng)、液壓轉(zhuǎn)向系統(tǒng)、液壓傳動系系統(tǒng)、液壓潤滑系統(tǒng)及部 分液壓控制的操控系統(tǒng)等,具體應(yīng)用有液壓提升、液壓輸出、液壓制動、液壓操控差速鎖、液壓離合器(PTO、變速箱)、液壓減震駕駛室等,主要應(yīng)用如表1 所示。隨著機(jī)電液一體化技術(shù)的發(fā)展,液壓技術(shù)的應(yīng)用水平直接決定了拖拉機(jī)的智能化水平,比如說電控液壓懸掛技術(shù)、電控液壓轉(zhuǎn)向或線控液壓轉(zhuǎn)向技術(shù)、液壓懸浮減震技術(shù)等,這些技術(shù)在國外已 經(jīng)是較為成熟的技術(shù)。
表1 液壓技術(shù)在拖拉機(jī)上的應(yīng)用
1.2 電動拖拉機(jī)
電動拖拉機(jī)已有百余年的發(fā)展歷史,近些年隨著電池的性能得到提高,電動拖拉機(jī)的優(yōu)點逐漸明顯。與傳統(tǒng)的燃油拖拉機(jī)相比,其扭矩較大,且可以實現(xiàn)無級變速,具有高效、底噪、低污染等優(yōu)點。但針對電動拖拉機(jī)的能源管理技術(shù)、電機(jī)技術(shù)、控制技術(shù)等與拖拉機(jī)的滿足惡劣環(huán)境工作、續(xù)航時長高、安全性好等要求還有差距,其應(yīng)用范圍仍然較窄。
2017年,在法國SIMA展上,約翰迪爾發(fā)布了其開發(fā)的純電動拖拉機(jī):SESAM(SustainableEnergySupplyforAgriculturalMachines),該電動拖拉機(jī)已經(jīng)完成田間作業(yè)試驗,功率為260 kW,可持續(xù)工作4 h或滿足55 km的運輸作業(yè)。以中國農(nóng)業(yè)大學(xué)、南京農(nóng)業(yè)大學(xué)為主的高校就電動拖拉機(jī)構(gòu)、驅(qū)動系統(tǒng)、CAN總線傳輸、控制策略、試驗臺架進(jìn)行了理論分析、仿真試驗、臺架試驗,取得了一定的研究成果,部分學(xué)者研究并試制了果園用小功率的電動拖拉機(jī)樣機(jī),基本滿足果園旋耕、中耕、施肥等作業(yè)要求,但是中大功率的電動拖拉機(jī)仍無成熟樣機(jī)。2012年,中國拖拉機(jī)公司與美國公司合作開展電動拖拉機(jī)相關(guān)技術(shù)的研究,但至今未見關(guān)于推出樣機(jī)的相關(guān)信息。2018年由國家農(nóng)機(jī)裝備創(chuàng)新中心研發(fā)的以自主知識產(chǎn)權(quán)的電控系統(tǒng)為核心,集成應(yīng)用北斗導(dǎo)航、毫米波雷達(dá)、視覺等無人駕駛系統(tǒng)的國內(nèi)第一臺純電動無人駕駛拖拉機(jī)進(jìn)入人們視線,并已開始田間試驗階段。
1. 3 電控液壓懸掛
懸掛是拖拉機(jī)的關(guān)鍵組成部分,是實現(xiàn)拖拉機(jī)耕地、播種、施肥等作業(yè)功能的基本配置。早期,作業(yè)機(jī)具多以繩索或鏈條連接,直至19世紀(jì)30年代出現(xiàn)了液壓三點懸掛裝置,到現(xiàn)在拖拉機(jī)上已基本標(biāo)配液壓懸掛系統(tǒng)。傳統(tǒng)的液壓懸掛采用機(jī)械液壓方式實現(xiàn)反饋控制,隨著傳感器技術(shù)的發(fā)展,反饋信號可以通過相應(yīng)的傳感器來獲取,加上電子控制技術(shù)的應(yīng)用,電控液壓懸掛技術(shù)逐漸成熟。電控液壓懸掛是指,數(shù)據(jù)采集系統(tǒng)通過力、位置、轉(zhuǎn)速等傳感器獲取拖拉機(jī)耕作時的耕作阻力、耕作深度、拖拉機(jī)滑轉(zhuǎn)率,并提高處理器輸出指令進(jìn)而控制液壓油缸的伸縮實現(xiàn)控制懸掛的提升與下降,保證懸掛最佳的工作狀態(tài)或調(diào)整到預(yù)設(shè)的耕作位置,實現(xiàn)耕作深度的自動控制,現(xiàn)常用的液壓懸掛控制方式有力、位綜合控制或者力、位、滑轉(zhuǎn)率綜合控制。
電控液壓懸掛控制系統(tǒng)(EHR)技術(shù)較為成熟,在國外先進(jìn)企業(yè)得到了廣泛應(yīng)用,該系統(tǒng)在實現(xiàn)耕作深度自動控制的基礎(chǔ)上還可以實現(xiàn)故障診斷、主動減震、擴(kuò)展控制、前提升器高度控制、接地壓力控制等功能。試驗表明,該系統(tǒng)控制誤差較小,精度較高。中國農(nóng)業(yè)大學(xué)、南京農(nóng)業(yè)大學(xué)、江蘇大學(xué)等高校就自動耕深控制技術(shù)的智能控制算法、CAN總線傳輸技術(shù)、多參數(shù)調(diào)節(jié)技術(shù)等進(jìn)行了深入的研究,取得了豐富的理論成果,制作了樣機(jī),取得了一定的研究成果。部分公司也推出了較為成熟的產(chǎn)品,其中悅達(dá)智能農(nóng)業(yè)裝備有限公司在綜合市場與成本的前提下,研制了新型的適合中國國情的力位綜合控制的電控液壓懸掛系統(tǒng)。
1.4導(dǎo)航駕駛系統(tǒng)
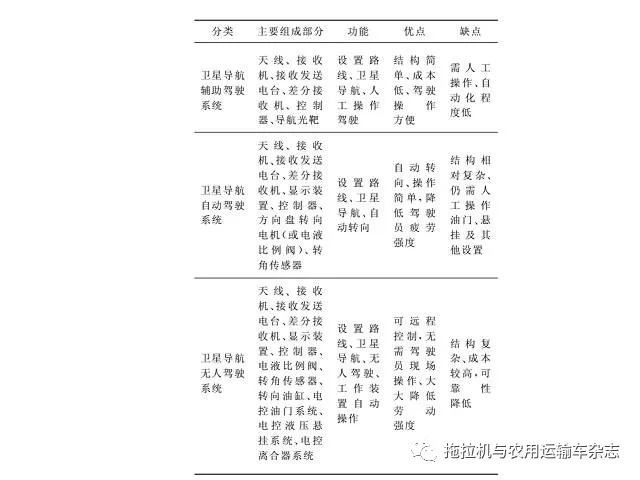
拖拉機(jī)自動導(dǎo)航駕駛具有直線行駛偏差小、滿足夜間作業(yè)、降低駕駛員疲勞強(qiáng)度、減少人力資源、提高作業(yè)效率等優(yōu)點,是精準(zhǔn)農(nóng)業(yè)的基礎(chǔ)。實現(xiàn)拖拉機(jī)導(dǎo)航的方法有多種,包括衛(wèi)星導(dǎo)航、視覺導(dǎo)航、電磁導(dǎo)航等,現(xiàn)在拖拉機(jī)上應(yīng)用較多的就是衛(wèi)星導(dǎo)航方法,自動導(dǎo)航駕駛技術(shù)的關(guān)鍵在于環(huán)境感知技術(shù)、地圖構(gòu)建技術(shù)、路徑規(guī)劃技術(shù)、轉(zhuǎn)向控制技術(shù)等。根據(jù)駕駛的自動程度,拖拉機(jī)導(dǎo)航駕駛系統(tǒng)又可以分為輔助駕駛系統(tǒng)、自動駕駛系統(tǒng)、無人駕駛系統(tǒng),各有優(yōu)缺點,具體分類如表2所示。國外先進(jìn)拖拉機(jī)企業(yè)現(xiàn)已有成熟的導(dǎo)航產(chǎn)品,且已實現(xiàn)模塊化,移植性較好,通過參數(shù)的調(diào)整設(shè)置,可以靈活的應(yīng)用到不同的拖拉機(jī)上。
表2基于衛(wèi)星的拖拉機(jī)自動導(dǎo)航駕駛系統(tǒng)分類
上世紀(jì)70年代美國發(fā)明GPS以來,其在農(nóng)業(yè)上的應(yīng)用范圍、方式得到不斷拓展。如今北斗導(dǎo)航系統(tǒng)工作衛(wèi)星已達(dá)33顆,服務(wù)性能不斷提高,民用范圍逐漸擴(kuò)大,基于北斗導(dǎo)航的自動駕駛拖拉機(jī)也在研發(fā)試用當(dāng)中。中國農(nóng)業(yè)大學(xué)、南京農(nóng)業(yè)大學(xué)、華中農(nóng)業(yè)大學(xué)、重慶理工大學(xué)等高校就自動導(dǎo)航轉(zhuǎn)向控制系統(tǒng)、控制決策方法、障礙物識別等關(guān)鍵技術(shù)進(jìn)行了研究試驗,取得了豐富的理論成果。部分企業(yè)也推出了自動導(dǎo)航拖拉機(jī),雷沃重工股份有限公司、中國一拖集團(tuán)有限公司均推出了自主研發(fā)的自動導(dǎo)航拖拉機(jī),以雷沃重工為例,其自動導(dǎo)航拖拉機(jī)可實現(xiàn)定位、導(dǎo)航、機(jī)具自動調(diào)節(jié)等功能,控制精度高,可滿足多種田間作業(yè)。
1.5駕駛室技術(shù)
傳統(tǒng)的拖拉機(jī)駕駛室較為簡易,以遮風(fēng)擋雨為基本功能,如今拖拉機(jī)駕駛室在保證視野的基礎(chǔ)上更加注重安全性、舒適性、可靠性,更加智能化、信息化,可完成拖拉機(jī)的大部分信息顯示記錄、駕駛操控、機(jī)具控制、遠(yuǎn)程通訊等功能。綜合來看,其先進(jìn)性主要體現(xiàn)在如下幾個方面。
安全性是拖拉機(jī)駕駛室的基本要求,同樣也是先進(jìn)性的體現(xiàn)。作為防護(hù)裝置,拖拉機(jī)駕駛室須滿足壓垮、側(cè)翻等強(qiáng)度要求,須有滿足逃生的緊急出口;視野需要滿足標(biāo)準(zhǔn)要求,后視鏡位置須合理,保證視野良好,滿足安全駕駛,可選裝攝像頭及輔助顯示系統(tǒng);須安裝工作燈滿足夜間安全作業(yè)及照明需求;駕駛座須安裝安全帶;前擋風(fēng)玻璃應(yīng)為安全玻璃;內(nèi)飾材料的阻燃性能需滿足標(biāo)準(zhǔn)要求。
駕駛舒適性上,先進(jìn)的技術(shù)主要有:在駕駛室與車架的連接處加裝減振懸架、減震彈簧或阻尼裝置,降低整機(jī)的振動水平;方向盤及操縱桿件避振安裝,減少整機(jī)振動對手臂的沖擊,提高駕駛方向的準(zhǔn)確性;安裝冷暖空調(diào),可實現(xiàn)溫度、風(fēng)速的控制;密封駕駛室,可滿足降低噪聲,隔斷沙塵、農(nóng)藥的要求;減震駕駛座椅,可自主調(diào)整座椅的阻尼程度,降低整機(jī)振動對駕駛員身體直接沖擊。
操控人機(jī)工程上,先進(jìn)性主要體現(xiàn)在:操縱按鈕、桿件、界面分類集中合理布置,方便駕駛員操縱使用;信息顯示儀表、警示燈布置簡潔明了,操作簡單、信息簡明;階梯扶手滿足標(biāo)準(zhǔn)要求的同時充分考慮到駕駛員活動自如、操作方便的要求;設(shè)置有副駕駛座、杯托、文件柜、音響系統(tǒng)、點煙器、遮陽簾等,滿足駕駛員多元需求。
智能化方面,先進(jìn)性主要表現(xiàn)在駕駛室內(nèi)實現(xiàn)拖拉機(jī)的大部分智能控制。控制按鈕、界面、桿件,顯示界面等已經(jīng)是駕駛室的重要組成部分,且多數(shù)先進(jìn)駕駛室將部分信息顯示界面設(shè)置于右前立柱,基本已經(jīng)融為一體。部分拖拉機(jī)將大部分操作按鍵設(shè)置于與駕駛座為一體的扶手上,與座椅同步轉(zhuǎn)動,其基本上可以實現(xiàn)大部分的拖拉機(jī)功能的操作,十分智能、簡便。
以 CASE Magnum 系列拖拉機(jī)駕駛室為例,其配置減震懸架,可以隔離底盤振動,保證駕駛平穩(wěn);空氣懸浮系統(tǒng)的轉(zhuǎn)椅,可以40°右轉(zhuǎn),實 現(xiàn)180°的全方位視野,駕駛室的控件也位于右上方,一切都在視野之內(nèi)。
裝有 MultiControl扶手控制臺與ICP直觀控制面板,可選 AFSPro700TM 觸屏監(jiān)視器,可隨駕駛座同步轉(zhuǎn)動,所有重要操作都集成在一個簡單的控制器上,可以實現(xiàn)速度選擇、換向、油門、地頭管理控制、電子遙控閥、后端掛接控制、PTO、操縱桿等功能。配備智能空調(diào),可以實現(xiàn)溫度自動控制;方向盤可以傾斜并調(diào)節(jié)高度;右前立柱設(shè)有顯示與監(jiān)控面板,顯示清晰、簡潔、易讀,綜合性能監(jiān)視器可提供額外的反饋,包括拖拉機(jī)系統(tǒng)狀態(tài)、滑轉(zhuǎn)率、已耕作面積和維護(hù)提醒等,如果存在任何警告信息,顯示器會向駕駛員報警,并在必要時自動關(guān)閉發(fā)動機(jī)以保護(hù)機(jī)器。
1.6動力換擋
動力換擋是拖拉機(jī)上先進(jìn)的動力傳動方案,其是機(jī)電液一體化技術(shù)在拖拉機(jī)的典型應(yīng)用,其主要是利用電控液壓離合器、制動器,在不斷開動力傳動的前提下實現(xiàn)快速換擋。動力換擋技術(shù)克服了傳統(tǒng)傳動系統(tǒng)停頓換擋、動力中斷的缺點,更加方便快捷,提高了工作效率。動力換擋技術(shù)已有60余年的歷史,上世紀(jì)50年代末,動力換擋變速箱首次應(yīng)用于卡特彼勒履帶拖拉機(jī)上,20世紀(jì)90年代,該技術(shù)在普遍應(yīng)用在大功率或重型拖拉機(jī)上。動力換擋變速箱主要由機(jī)械傳動系統(tǒng)、液壓控制系統(tǒng)和電子控制系統(tǒng)三部分組成。技術(shù)難點主要在液壓技術(shù)及電子控制策略上。如今國外 先 進(jìn) 農(nóng) 機(jī) 企 業(yè) 該 技 術(shù) 已 經(jīng) 成 熟,如 Case、JohnDeere、Claas、Challenger、Fendt、MasseyFerguson、Deutz-Fahr等,我國拖拉機(jī)企業(yè)在收購國外公司的基礎(chǔ)上開發(fā)出了自主的動力換擋技術(shù),部分企業(yè)在積極的研發(fā)自主知識產(chǎn)權(quán)的動力換擋技術(shù),即將開展型式試驗。
1.7無極變速
無極變速是指速比可連續(xù)變換。拖拉機(jī)作業(yè)環(huán)境惡劣,如果要達(dá)到較高的動力性及經(jīng)濟(jì)性,便需要根據(jù)作業(yè)負(fù)荷或速度實時調(diào)整傳動系的傳動比,使發(fā)動機(jī)工作在傳動效率較高區(qū)間,經(jīng)濟(jì)性較好,是拖拉機(jī)傳動技術(shù)發(fā)展的重要方向。
無級變速按傳動方式可以分為機(jī)械傳動、流體傳動、電氣傳動、液壓機(jī)械雙流傳動等。功率分流式無級變速傳動系已普遍使用,根據(jù)德國農(nóng)業(yè)協(xié)會試驗研究,該方式較動力換擋變速箱作業(yè)燃油消耗率更低。
無級變速種類主要分為四類,具體情況如表3所示。
表3 拖拉機(jī)無極變速器型式對比
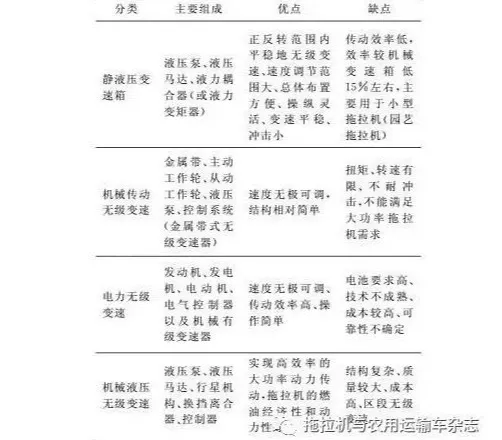
在日本、韓國等國家,其作業(yè)田塊面積不大,拖拉機(jī)以中小功率為主,其對大功率、大扭矩要求不高,主要采用靜液壓變速的無級變速。
如今,ACGO、CNH、JohnDeer、Claas、SameDeutz-Fahr等公司均推出了無級變速技術(shù),技術(shù)路線略有區(qū)別。中國僅有一拖東方紅LW4004無級變速重型拖拉機(jī)以及常州東風(fēng)農(nóng)機(jī)集團(tuán)有限公司的鏈條傳動的無級變速拖拉機(jī),且東方紅 LW4004并沒有批量生產(chǎn)銷售,東風(fēng)仍處于型式試驗階段。
1.8 電功率
隨著拖拉機(jī)智能化、大型化及作業(yè)機(jī)械復(fù)式化的發(fā)展,傳統(tǒng)的動力輸出軸和液壓輸出已經(jīng)不能完全滿足動力供應(yīng)的需求。在2007年,JohnDeere公司發(fā)布了提供電功率的拖拉機(jī),2009年,Belarus公司也向市場推出了一臺配置電功率輸出的拖拉機(jī)。近幾年,ZF(ZFFriedrichshafenAG)公司研制出成熟的集成發(fā)電機(jī)解決方案:TERRA+,該系統(tǒng)最大可以提供70kW的電功率,更加節(jié)能高效。
1.9 拖拉機(jī)ABS
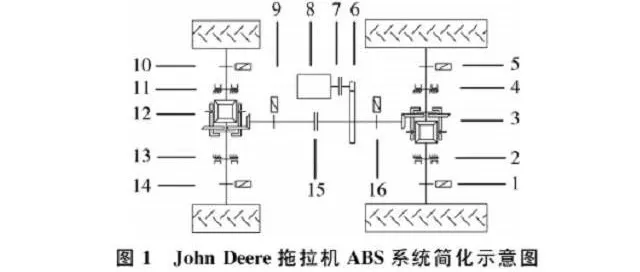
制動防抱死系統(tǒng)(ABS:AntilockBrakingSystem)是一種車輛剎車制動力控制系統(tǒng),可防止制動時車輪抱死,保證車輛整機(jī)可轉(zhuǎn)向性。如今,拖拉機(jī)最大行駛速度較高(在中國拖拉機(jī)最高速度限制在40km/h,但一些國家高于此速度),尤其是掛車運輸或道路轉(zhuǎn)運行駛時,傳統(tǒng)制動系統(tǒng)便不能保證高速制動的安全,因此ABS制動系統(tǒng)有必要應(yīng)用到高速拖拉機(jī)或?qū)I(yè)拖拉機(jī)上,滿足高速行駛時的制定安全性。國外先進(jìn)企業(yè)如 New Holland、JohnDeere、Deutz-Fahr等企業(yè)均已具備拖拉機(jī)ABS制動技術(shù),且已可以應(yīng)用到拖拉機(jī)上,我國在拖拉機(jī)ABS技術(shù)上基本沒有開展研究。
如圖1為John Deere的拖拉機(jī)ABS系統(tǒng)示意圖。其主要由輪速傳感器、制動單元、液壓系統(tǒng)(圖中未畫出)、控制單元(圖中未畫出)等組成,其可以根據(jù)各輪轉(zhuǎn)速、各制動單元液壓壓力控制控制閥的開閉,進(jìn)而控制各輪的制動力,在防止車輪抱死的情況下實現(xiàn)車輪的最大減速度。
1.10 先進(jìn)耕作系統(tǒng)
先進(jìn)耕作系統(tǒng)是指在電子控制、液壓控制、傳感器、數(shù)據(jù)傳輸?shù)然A(chǔ)技術(shù)的基礎(chǔ)上,集成物聯(lián)網(wǎng)、衛(wèi)星導(dǎo)航駕駛、能源管理、電控液壓懸掛等拖拉機(jī)技術(shù),聯(lián)接人、拖拉機(jī)、土地、控制中心(包括基于手機(jī)的app軟件和基于電腦的控制中心),實現(xiàn)拖拉機(jī)各項功能的全面、精確、智能控制,其是基于拖拉機(jī)的精確農(nóng)業(yè),是拖拉機(jī)技術(shù)的高級階段。世界先進(jìn)拖拉機(jī)企業(yè)在先進(jìn)耕作系統(tǒng)的研究起步較早,已有十余年的歷史,由于其基礎(chǔ)技術(shù)與各項集成技術(shù)已經(jīng)較為成熟,現(xiàn)階段先進(jìn)耕作系統(tǒng)已經(jīng)成功走向市場,代表了前沿的拖拉機(jī)技術(shù)。CaseIH耕作系統(tǒng)(AFSTM)為僅為典型的先進(jìn)耕作系統(tǒng),該系統(tǒng)主要由個模塊組成,分別是車輛控制、車輛導(dǎo)航、AFSTM農(nóng)場管理軟件、AFSCNO-NECTTM遠(yuǎn)程信息處理,各模塊分工明確,功能強(qiáng)大,可實現(xiàn)對整機(jī)的控制、自動導(dǎo)航駕駛、信息顯示存儲等基礎(chǔ)功能,同時還可以實現(xiàn)農(nóng)田信息、作業(yè)情況、產(chǎn)量信息等的記錄,并在此數(shù)據(jù)的基礎(chǔ)上進(jìn)行分析統(tǒng)計,幫助農(nóng)場主或機(jī)手進(jìn)行田間管理作業(yè)的正確決策,是物聯(lián)網(wǎng)的具體應(yīng)用,是精確農(nóng)業(yè)的載體。
二、對比分析
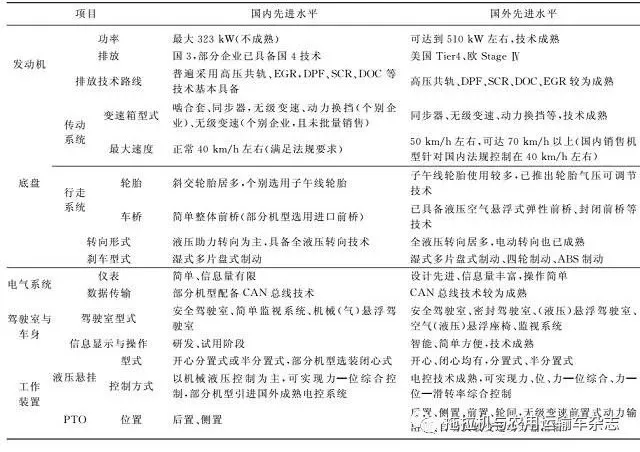
通過以上分析并進(jìn)一步查閱文獻(xiàn),在掌握國內(nèi)外主流拖拉機(jī)產(chǎn)品技術(shù)特點的基礎(chǔ)上,分別就發(fā)動機(jī)、底盤、駕駛室與車身、工作裝置等部分分別就國內(nèi)外拖拉機(jī)先進(jìn)水平的拖拉機(jī)技術(shù)特點進(jìn)行的總結(jié)概括,列出國內(nèi)外主流拖拉機(jī)產(chǎn)品先進(jìn)技術(shù)對比情況,如表4所示。
表4國內(nèi)外主流拖拉機(jī)產(chǎn)品先進(jìn)技術(shù)對比
三、總結(jié)分析
經(jīng)過上述先進(jìn)技術(shù)分析以及國內(nèi)外拖拉機(jī)主流技術(shù)對比,可以發(fā)現(xiàn)我國拖拉機(jī)技術(shù)水平較國外先進(jìn)企業(yè)差距較大,主要在智能化與信息化上面,具體表現(xiàn)在智能控制策略、機(jī)電液一體化技術(shù)、制造工藝、人機(jī)工程等四個方面。
1)智能控制策略。智能控制策略是智能化、信息化拖拉機(jī)的核心,如自動導(dǎo)航駕駛、電控液壓懸掛、動力換擋、無級變速等技術(shù),其關(guān)鍵也在于智能控制策略。國外先進(jìn)企業(yè)在上述先進(jìn)技術(shù)上均具有成熟的智能控制策略,如ACGO的無級變速器、CaseIH先進(jìn)耕作系統(tǒng)(AFSTM)。我國部分高校及科研院所針對動力換擋、自動導(dǎo)航等技術(shù)進(jìn)行了豐富的控制策略理論研究及臺架試驗,如基于模糊控制算法的耕深控制技術(shù)、基于模糊神經(jīng)網(wǎng)絡(luò)的直線行走控制策略、無級變速拖拉機(jī)智能變速規(guī)律等,但是多處于研究階段,應(yīng)用水平較低。
2)機(jī)電液一體化技術(shù)。我國拖拉機(jī)機(jī)電液一體化技術(shù)水平較差,從全液壓轉(zhuǎn)向液壓懸掛、動力換擋、無級變速、ABS到自動導(dǎo)航等技術(shù)均需要機(jī)械、電控、液壓等技術(shù)的有效結(jié)合,我國液壓技術(shù)相對落后,尤其是液壓閥可靠性有待提高。國外先進(jìn)拖拉機(jī),電子控制技術(shù)、液壓技術(shù)、控制策略運用成熟,引領(lǐng)拖拉機(jī)技術(shù)的發(fā)展,整體來看,我國拖拉機(jī)機(jī)電液一體化技術(shù)與國外仍存在較大差距。
3)制造工藝。我國拖拉機(jī)企業(yè)眾多,且多數(shù)為中小企業(yè),部分還是以組裝為主的家庭作坊式工廠,且我國農(nóng)機(jī)工業(yè)基礎(chǔ)較差,生產(chǎn)過程控制水平較低,對質(zhì)量體系要求不高,工藝要求低,導(dǎo)致拖拉機(jī)整體裝備質(zhì)量不高,直接結(jié)果就是振動、噪聲水平高,壽命下降,可靠性有待提高,維護(hù)成本高。
4)人機(jī)工程。我國拖拉機(jī)人機(jī)工程仍處于起步階段,國外先進(jìn)拖拉機(jī)企業(yè)比較注重人機(jī)工程,尤其在駕駛室上面,可以協(xié)調(diào)操作顯示與安全性、舒適性于一體,振動、噪聲水平較小,駕駛員可以方面操作,大大降低勞動強(qiáng)度,提高了舒適性。
我國農(nóng)業(yè)機(jī)械相關(guān)高校、科研院所或者拖拉機(jī)企業(yè)應(yīng)該以《農(nóng)機(jī)裝備發(fā)展行動方案(2016—2025)》的落實為契機(jī),以《關(guān)于加快推進(jìn)農(nóng)業(yè)機(jī)械化和農(nóng)機(jī)裝備產(chǎn)業(yè)轉(zhuǎn)型升級的指導(dǎo)意見》為指導(dǎo),充分把握國家對新型高效農(nóng)業(yè)機(jī)械,尤其是拖拉機(jī)提出的具體發(fā)展要求,以培養(yǎng)優(yōu)質(zhì)人才、提高科研投入、提升制造工藝、攻克關(guān)鍵技術(shù)為發(fā)展路線,加強(qiáng)關(guān)鍵零部件的研發(fā)力度,如傳感器、液壓閥、控制器等,集中精力攻克關(guān)鍵技術(shù)如無級變速技術(shù)、智能控制策略,進(jìn)一步關(guān)注拖拉機(jī)人機(jī)工程,改善拖拉機(jī)的可靠性與舒適性,提高智能化、信息化水平,不斷提升我國拖拉機(jī)技術(shù)水平。
(來源:中國農(nóng)機(jī)工業(yè)援引拖拉機(jī)與農(nóng)用運輸車雜志)
農(nóng)先鋒網(wǎng)聲明:凡資訊來源注明為其他媒體來源的信息,均為轉(zhuǎn)載自其他媒體,并不代表本網(wǎng)站贊同其觀點,也不代表本網(wǎng)站對其真實性負(fù)責(zé)。您若對該文章內(nèi)容有任何疑問或質(zhì)疑,請立即與網(wǎng)站(www.v26656.cn)聯(lián)系,本網(wǎng)站將迅速給您回應(yīng)并做處理。
聯(lián)系郵箱:3267146135@qq.com
聯(lián)系郵箱:3267146135@qq.com




