農業機器人指的是一種以農產品為操作對象,兼有人類部分信息感知和肢體行動功能,是綜合了多種學科交叉的可重復編程的柔性自動化或半自動化設備。
農業機器人能夠逐步代替人力而且不斷幫助農業生產降低勞動強度,同時,其還可提高勞動效率,幫助解決目前許多國家面對的勞動力稀缺難題。農業機器越來越受到農業人口較少的發達國家的重視,也成為國際農業裝備產業技術競爭的焦點之一。相對而言,我國與發達國家水平差距明顯,如農牧業工藝與機械設備結合的不夠緊密,國內穩定性、故障率、易用性等指標不理想,生產成本較高,生產效率偏低,智能化程度不高,核心算法的差距顯著。
但未來的農場一定將是無人農場,將會需要大量的農業機器人,國內很多研究機構和企業也在探討無人農場,也建設了無人農場的示范,雖然我國對機器人的研究起步相對較晚,但產業發展迅速,同時政策上支持力度不小,工業和信息化部、發展改革委、財政部于早前就曾聯合發布《機器人產業發展規劃(2016—2020年)》,就為農業機器人的進一步發展提供了新機遇。

據分析稱,農業機器人目前已成為世界熱點,2017-2021年期間,人工智能在農業中應用的年復合增長率為22.68%。2016年為27.6億美元,預計2020年為111億美元,2025年為308億美元,主要包括農業無人機,無人拖拉機、智能收獲機、智能除草機、擠奶機器人、農業自動化與控制系統等。農業機器人的廣泛應用是人工智能農業領域市場快速發展的重要因素。而目前中國農業機器人研究產出規模已經超過美國,同時重點關注在收獲和采摘機器人。
本文以農業機器人相關研究SCI論文為對象,對農業機器人的論文產出趨勢、熱點研究主題、國家競爭態勢及研究前沿進行了四個方面的分析,旨在把握該領域的國際總體競爭態勢和研究前沿方向,為科技布局和科技管理提供決策支撐。
研究前沿分析的方法是,將所有檢索到的SCI論文數據進行匯總,以排名在Top10%的論文為選擇基礎,篩選出被引頻次高的論文,同時在此基礎上邀請專家進行甄選,同時選出重點論文,并對逐篇重點論文進行內容解讀,然后根據研究主題聚類、分析,以此獲得當前農業機器人的研究前沿方向及重點研究內容。
1.國際競爭態勢
該篇論文分析稱,中國農業機器人研究產出規模超過美國,重點關注收獲和采摘機器人。2013—2018年,世界所有能檢索到與農業機器人研究相關的SCI論文,數量為484篇(檢索日期截止到2018年12月)論文數據表明,相關農業機器人的研究論文從2013年的53篇增加到了2017年的114篇(2018年數據不完整),增長近1倍。從數據可以看出,年度數量變化呈增加趨勢,表明各國近年來農業機器人研究產出規模不斷擴大,同時該領域仍然處于研究的上升期,且越來越受到關注。
2. 領先國家
2013—2018年,世界農業機器人SCI論文貢獻自全球52個國家,其中數量最多的前10個國家依次是中國、美國、西班牙、德國、澳大利亞、荷蘭、以色列、意大利、英國和日本,10個領先國家的論文數量合計426篇,約占論文總量的88%。

從論文數量的年度變化可以看出,在農業機器人方面,中國的論文數量逐年增加,且增長趨勢非常明顯,年度論文數量2014年開始超過美國躍居第一。當然這也不乏中國農業相關的研究人員與日俱增的因素。
3.熱點主題
在農業機器人相關的SCI論文中表明,各國的熱點研究主題主要集中在作業場景與關鍵技術,分布較為不平均。其中中國比較關注的是收獲和采摘機器人的研究,而美國、澳大利亞、荷蘭和英國等更關注擠奶機器人,以色列和日本較為關注收獲機器人,德國與意大利關注噴灌機器人。
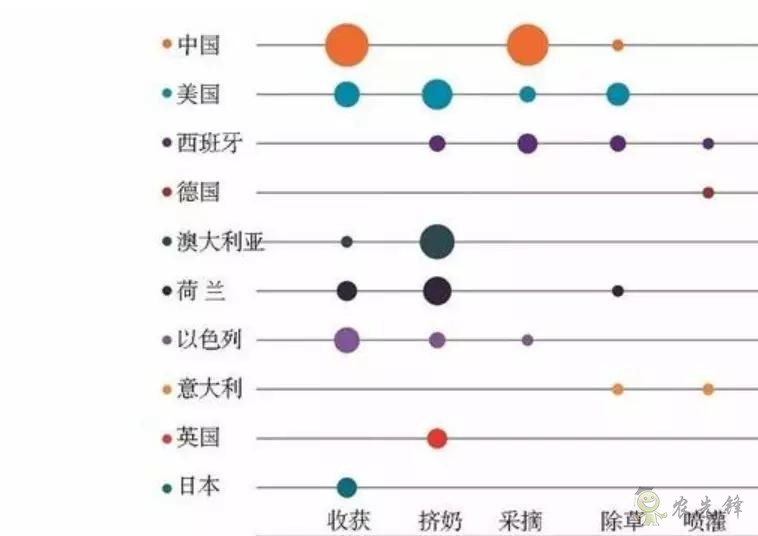
可以看到各國的農業機器人相關研究都很大程度上受到本國的農業國情影響,同時研究能產出效益的還是根據實際需求得到了很好實驗和驗證之后的成果。
4.前沿方向
在論文整體產出上,雖然中國農業機器人研究產出規模超過美國,但被引頻次能在一定程度上反映論文的質量和影響力,高被引論文的研究內容在一定程度上可以反映該領域的研究前沿。
從論文內容中進行判斷,我們可以很好確定出相關的前沿方向。例如對檢索到的與農業機器人相關的SCI論文進行篩選、判讀,可以看出,研究主題目前聚集在3個前沿方向,分別在作業對象識別和定位算法優化,導航和路徑規劃算法優化,以及對作業(農業生產)對象的分選與監測研究。

在作業對象識別和定位算法優化方面,各國的主要研究對番茄、甜椒、蘋果、柑橘和荔枝等蔬果及雜草和作物病害等的識別,而中國在這一方向上的研究產出相對較多。
導航和路徑規劃算法優化方面,日本和西班牙的相關研究則更加超前。
美國在作業對象的分選與監測研究上產出相對較多,研究重點包括果實分選及水產養殖監測和牛奶產量與風險監測等。
5.結語
全球農業生產的集約化和規模化進程不斷加快,但無疑隨著人口的穩定和下降趨勢,世界農業勞動力一定會不斷減少,但各國對農業機器人的需求將持續加大。由于農業環境和作業對象的復雜性、多變性和非結構性,目前可以看到,農業機器人研發難度大,相關作業效果有待提高。
在作業對象識別和定位、導航和路徑規劃、作業對象的分選與監測等前沿方向上,要以開放創新的理念開發和應用新技術,促進具有多環境適應性的智能農業機器人的研發。
在技術上,隨著云計算、大數據和人工智能等新一代信息技術與農業技術的深度融合,農業機器人作為新一代智能化農業機械將突破瓶頸并得到廣泛應用。
同時,未來農牧機器人新技術研究包括深度學習、新材料、人機共融、觸覺反饋等技術,都值得全世界人類進行探索。深度學習提高農業機器人感知和決策能力,如感知包括表型特征識別、場景識別定位、作物病害識別。決策包括運動路徑優化、作業姿態優化、作業次序優化。觸覺反饋控制要增強農業機器人感知和執行能力,如能力反饋的感知與執行能力。
新材料可以改善農業機器人執行能力,人機共融是未來農業發展重要的一環,可提高作業效率,人機共融技術減少了研發成本,由機器人預測人的意圖配合完成工作。建立更加龐大的、宏觀的、虛擬的、戰略性的農業機器人系統,實現無人農場,這才是農業大數據的本質內涵。
農業機器人能夠逐步代替人力而且不斷幫助農業生產降低勞動強度,同時,其還可提高勞動效率,幫助解決目前許多國家面對的勞動力稀缺難題。農業機器越來越受到農業人口較少的發達國家的重視,也成為國際農業裝備產業技術競爭的焦點之一。相對而言,我國與發達國家水平差距明顯,如農牧業工藝與機械設備結合的不夠緊密,國內穩定性、故障率、易用性等指標不理想,生產成本較高,生產效率偏低,智能化程度不高,核心算法的差距顯著。
但未來的農場一定將是無人農場,將會需要大量的農業機器人,國內很多研究機構和企業也在探討無人農場,也建設了無人農場的示范,雖然我國對機器人的研究起步相對較晚,但產業發展迅速,同時政策上支持力度不小,工業和信息化部、發展改革委、財政部于早前就曾聯合發布《機器人產業發展規劃(2016—2020年)》,就為農業機器人的進一步發展提供了新機遇。
據分析稱,農業機器人目前已成為世界熱點,2017-2021年期間,人工智能在農業中應用的年復合增長率為22.68%。2016年為27.6億美元,預計2020年為111億美元,2025年為308億美元,主要包括農業無人機,無人拖拉機、智能收獲機、智能除草機、擠奶機器人、農業自動化與控制系統等。農業機器人的廣泛應用是人工智能農業領域市場快速發展的重要因素。而目前中國農業機器人研究產出規模已經超過美國,同時重點關注在收獲和采摘機器人。
本文以農業機器人相關研究SCI論文為對象,對農業機器人的論文產出趨勢、熱點研究主題、國家競爭態勢及研究前沿進行了四個方面的分析,旨在把握該領域的國際總體競爭態勢和研究前沿方向,為科技布局和科技管理提供決策支撐。
研究前沿分析的方法是,將所有檢索到的SCI論文數據進行匯總,以排名在Top10%的論文為選擇基礎,篩選出被引頻次高的論文,同時在此基礎上邀請專家進行甄選,同時選出重點論文,并對逐篇重點論文進行內容解讀,然后根據研究主題聚類、分析,以此獲得當前農業機器人的研究前沿方向及重點研究內容。
1.國際競爭態勢
該篇論文分析稱,中國農業機器人研究產出規模超過美國,重點關注收獲和采摘機器人。2013—2018年,世界所有能檢索到與農業機器人研究相關的SCI論文,數量為484篇(檢索日期截止到2018年12月)論文數據表明,相關農業機器人的研究論文從2013年的53篇增加到了2017年的114篇(2018年數據不完整),增長近1倍。從數據可以看出,年度數量變化呈增加趨勢,表明各國近年來農業機器人研究產出規模不斷擴大,同時該領域仍然處于研究的上升期,且越來越受到關注。
2. 領先國家
2013—2018年,世界農業機器人SCI論文貢獻自全球52個國家,其中數量最多的前10個國家依次是中國、美國、西班牙、德國、澳大利亞、荷蘭、以色列、意大利、英國和日本,10個領先國家的論文數量合計426篇,約占論文總量的88%。
從論文數量的年度變化可以看出,在農業機器人方面,中國的論文數量逐年增加,且增長趨勢非常明顯,年度論文數量2014年開始超過美國躍居第一。當然這也不乏中國農業相關的研究人員與日俱增的因素。
3.熱點主題
在農業機器人相關的SCI論文中表明,各國的熱點研究主題主要集中在作業場景與關鍵技術,分布較為不平均。其中中國比較關注的是收獲和采摘機器人的研究,而美國、澳大利亞、荷蘭和英國等更關注擠奶機器人,以色列和日本較為關注收獲機器人,德國與意大利關注噴灌機器人。
可以看到各國的農業機器人相關研究都很大程度上受到本國的農業國情影響,同時研究能產出效益的還是根據實際需求得到了很好實驗和驗證之后的成果。
4.前沿方向
在論文整體產出上,雖然中國農業機器人研究產出規模超過美國,但被引頻次能在一定程度上反映論文的質量和影響力,高被引論文的研究內容在一定程度上可以反映該領域的研究前沿。
從論文內容中進行判斷,我們可以很好確定出相關的前沿方向。例如對檢索到的與農業機器人相關的SCI論文進行篩選、判讀,可以看出,研究主題目前聚集在3個前沿方向,分別在作業對象識別和定位算法優化,導航和路徑規劃算法優化,以及對作業(農業生產)對象的分選與監測研究。
在作業對象識別和定位算法優化方面,各國的主要研究對番茄、甜椒、蘋果、柑橘和荔枝等蔬果及雜草和作物病害等的識別,而中國在這一方向上的研究產出相對較多。
導航和路徑規劃算法優化方面,日本和西班牙的相關研究則更加超前。
美國在作業對象的分選與監測研究上產出相對較多,研究重點包括果實分選及水產養殖監測和牛奶產量與風險監測等。
5.結語
全球農業生產的集約化和規模化進程不斷加快,但無疑隨著人口的穩定和下降趨勢,世界農業勞動力一定會不斷減少,但各國對農業機器人的需求將持續加大。由于農業環境和作業對象的復雜性、多變性和非結構性,目前可以看到,農業機器人研發難度大,相關作業效果有待提高。
在作業對象識別和定位、導航和路徑規劃、作業對象的分選與監測等前沿方向上,要以開放創新的理念開發和應用新技術,促進具有多環境適應性的智能農業機器人的研發。
在技術上,隨著云計算、大數據和人工智能等新一代信息技術與農業技術的深度融合,農業機器人作為新一代智能化農業機械將突破瓶頸并得到廣泛應用。
同時,未來農牧機器人新技術研究包括深度學習、新材料、人機共融、觸覺反饋等技術,都值得全世界人類進行探索。深度學習提高農業機器人感知和決策能力,如感知包括表型特征識別、場景識別定位、作物病害識別。決策包括運動路徑優化、作業姿態優化、作業次序優化。觸覺反饋控制要增強農業機器人感知和執行能力,如能力反饋的感知與執行能力。
新材料可以改善農業機器人執行能力,人機共融是未來農業發展重要的一環,可提高作業效率,人機共融技術減少了研發成本,由機器人預測人的意圖配合完成工作。建立更加龐大的、宏觀的、虛擬的、戰略性的農業機器人系統,實現無人農場,這才是農業大數據的本質內涵。
農先鋒網聲明:凡資訊來源注明為其他媒體來源的信息,均為轉載自其他媒體,并不代表本網站贊同其觀點,也不代表本網站對其真實性負責。您若對該文章內容有任何疑問或質疑,請立即與網站(www.v26656.cn)聯系,本網站將迅速給您回應并做處理。
聯系郵箱:3267146135@qq.com
聯系郵箱:3267146135@qq.com