日本國立研究開發(fā)公司農(nóng)業(yè)和食品工業(yè)技術(shù)研究組織(Agricultural Research Organisation)、立命館大學(xué)和電裝株式會社(Denso Co.,Ltd.)公布了帶有自動行車的收割機(jī)器人的原型,該機(jī)器人可以采摘9種水果,例如蘋果和梨。

水果樹高度約為80 cm至2 m的水果,利用深度學(xué)習(xí)可以達(dá)到約95%的識別率,采摘機(jī)器人會自動識別并收獲。這個項目計劃在兩年內(nèi)實現(xiàn)商業(yè)化。它的收獲速度與人類差不多——每分鐘可以采摘5個,每小時約300件。


前驅(qū)自動駕駛汽車是通過利用通用自動駕駛技術(shù)和傳感器實現(xiàn)的,也可以將自動駕駛車輛與無人化學(xué)噴霧和割草結(jié)合使用。

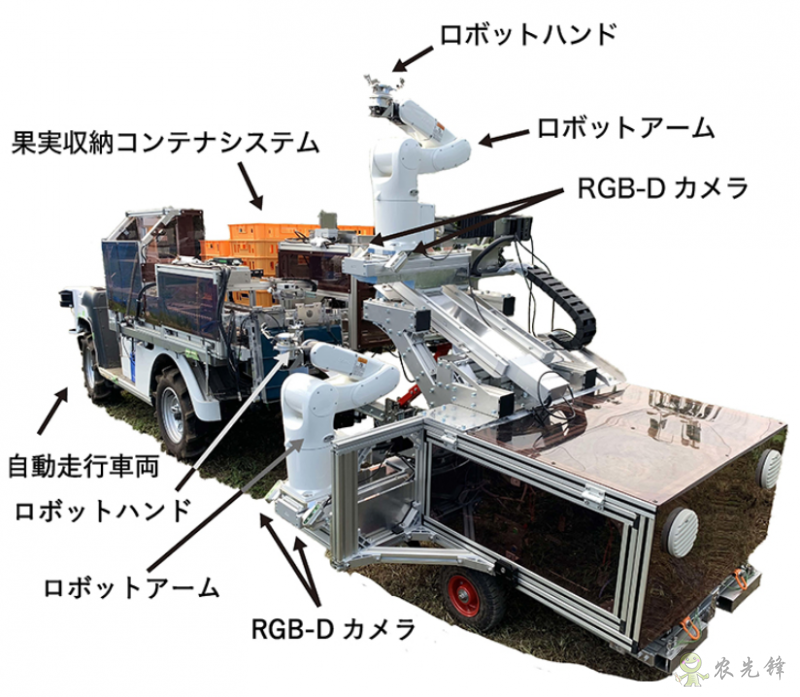
另外,安裝了兩個基于工業(yè)機(jī)器人開發(fā)的機(jī)械臂,并且每個機(jī)械臂(RGB-D)裝配了兩個攝像頭。這也用于區(qū)分水果、確定收割是否合適以及控制兩個臂以免它們碰撞。
具體而言,首先在行進(jìn)方向側(cè)用照相機(jī)搜索要收獲的水果。當(dāng)發(fā)現(xiàn)水果時,它將停止命令發(fā)送到自動駕駛車輛并停止。
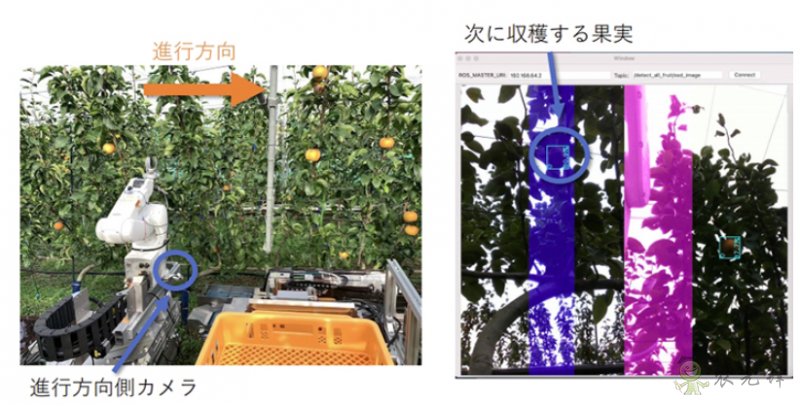
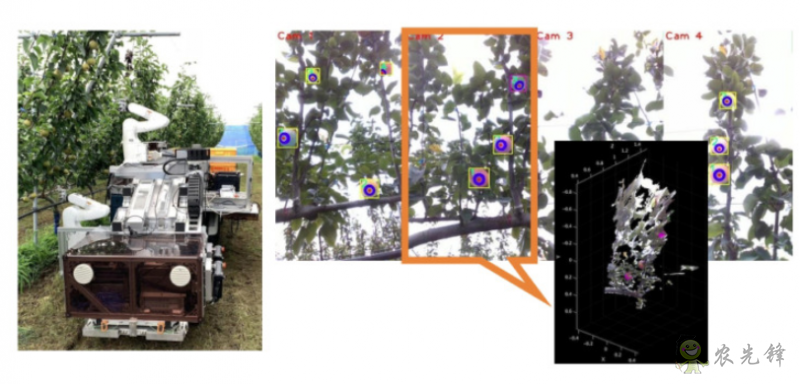
安裝在機(jī)器人上的四個攝像頭中的每個攝像頭都通過深度學(xué)習(xí)來識別和區(qū)分水果。用RGB-D攝像機(jī)測量距離,以獲取機(jī)器人到目標(biāo)的距離。
水果也可以用于水果底部的凹痕的辨別,由于曬傷而引起的顏色變化很小,并且僅易于觀察到由于成熟過程而引起的顏色變化。

收獲的水果被送到水果儲存容器系統(tǒng)。當(dāng)容器裝滿水果時,可以繼續(xù)自動收獲,同時自動更換空容器。
水果樹高度約為80 cm至2 m的水果,利用深度學(xué)習(xí)可以達(dá)到約95%的識別率,采摘機(jī)器人會自動識別并收獲。這個項目計劃在兩年內(nèi)實現(xiàn)商業(yè)化。它的收獲速度與人類差不多——每分鐘可以采摘5個,每小時約300件。
自動駕駛汽車牽引收割機(jī)器人和集裝箱
這次宣布的機(jī)器人是采摘蘋果、梨的模型。立命館大學(xué)負(fù)責(zé)開發(fā)用于確定水果識別和收割時間的軟件,電裝則負(fù)責(zé)收割機(jī)器人的硬件開發(fā)。硬件的主要特征是前部是經(jīng)過改裝的雅馬哈發(fā)動機(jī)電動高爾夫球車的“自動駕駛車輛”,后部是“用于收割的機(jī)器人臂和容納收割的水果的容器系統(tǒng)”。
這次宣布的機(jī)器人是采摘蘋果、梨的模型。立命館大學(xué)負(fù)責(zé)開發(fā)用于確定水果識別和收割時間的軟件,電裝則負(fù)責(zé)收割機(jī)器人的硬件開發(fā)。硬件的主要特征是前部是經(jīng)過改裝的雅馬哈發(fā)動機(jī)電動高爾夫球車的“自動駕駛車輛”,后部是“用于收割的機(jī)器人臂和容納收割的水果的容器系統(tǒng)”。
前驅(qū)自動駕駛汽車是通過利用通用自動駕駛技術(shù)和傳感器實現(xiàn)的,也可以將自動駕駛車輛與無人化學(xué)噴霧和割草結(jié)合使用。
另外,安裝了兩個基于工業(yè)機(jī)器人開發(fā)的機(jī)械臂,并且每個機(jī)械臂(RGB-D)裝配了兩個攝像頭。這也用于區(qū)分水果、確定收割是否合適以及控制兩個臂以免它們碰撞。
具體而言,首先在行進(jìn)方向側(cè)用照相機(jī)搜索要收獲的水果。當(dāng)發(fā)現(xiàn)水果時,它將停止命令發(fā)送到自動駕駛車輛并停止。
安裝在機(jī)器人上的四個攝像頭中的每個攝像頭都通過深度學(xué)習(xí)來識別和區(qū)分水果。用RGB-D攝像機(jī)測量距離,以獲取機(jī)器人到目標(biāo)的距離。
水果也可以用于水果底部的凹痕的辨別,由于曬傷而引起的顏色變化很小,并且僅易于觀察到由于成熟過程而引起的顏色變化。
收獲的水果被送到水果儲存容器系統(tǒng)。當(dāng)容器裝滿水果時,可以繼續(xù)自動收獲,同時自動更換空容器。
農(nóng)先鋒網(wǎng)聲明:凡資訊來源注明為其他媒體來源的信息,均為轉(zhuǎn)載自其他媒體,并不代表本網(wǎng)站贊同其觀點,也不代表本網(wǎng)站對其真實性負(fù)責(zé)。您若對該文章內(nèi)容有任何疑問或質(zhì)疑,請立即與網(wǎng)站(www.v26656.cn)聯(lián)系,本網(wǎng)站將迅速給您回應(yīng)并做處理。
聯(lián)系郵箱:3267146135@qq.com
聯(lián)系郵箱:3267146135@qq.com