1. 產品簡介:
果蔬采摘機器人是融合人工智能和多傳感器技術,采用基于深度學習的視覺算法,引導機械手臂完成識別、定位、抓取、切割、放置任務的高度協同自動化系統,采摘成功率可達90%以上,可解決自然條件下的果蔬選擇性收獲難題,是智慧農業的標志性產品。
果蔬采摘機器人由行走系統、視覺系統和采摘執行系統組成。行走系統結合路面情況,選取履帶式、輪式或軌道式等行走機構滿足多種應用場景,采用視覺、激光、磁導航和SLAM算法,集合超聲、紅外和激光等多種傳感器,使其更能適應田間多種環境。視覺系統采用雙目立體視覺定位技術,實現對果蔬大小、顏色、形狀、成熟度和采摘位置的信息獲取及處理;采摘執行系統采用多自由度機械手臂,通過合理的路徑規劃,完成抓取、采摘和放籃等多種任務。
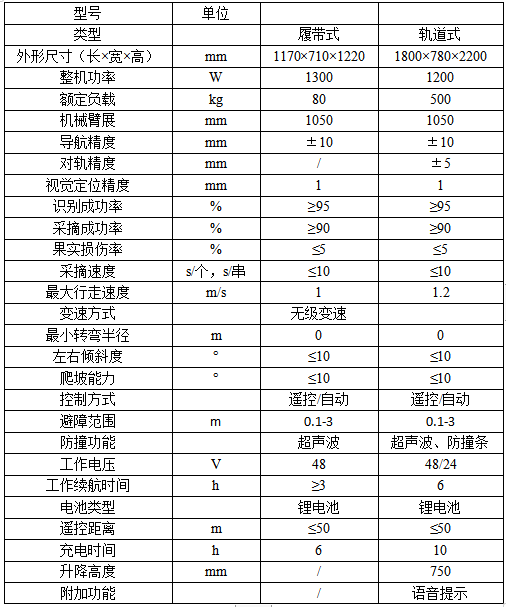
2、參數指標
3.功能特點
1) 果實精準采收
雙目立體視覺精準判別可采摘果蔬的大小、顏色、形狀、成熟度和采摘位置定位;
輕巧型多自由度機械臂,輕松完成路徑規劃、采摘和放籃多個任務;
柔性采摘手通過自適應控制完成果蔬采摘位置抓取,不傷果;
按照作物商品性特點,采用按個、按串或采收包裝一體化等多種采收方式。
2) 環境智能感知與自主避障
環360°雷達通過不間斷掃描,可預先探測作業環境和障礙物信息,并根據所處環境及時調整行走策略,實現自主避障。
3) 多地形作業與導航
針對農業地形和材質的多樣性,提供履帶式、輪式或軌道式多種行走系統和驅動方式滿足不同場景要求;
搭載視覺、激光或磁感應傳感器完成路徑規劃和導航;
輔以動力匹配、結構優化,輕松完成爬坡越障。
4) 智能充電系統
機器人與不少于70Ah的智能電池搭配使用,連續運行時間達3小時;
抽屜式安裝使電池內嵌在機器人內部,輸出線材進行增強防護和鎖扣式連接,提升了安全性和更換方便性;
電池強化了自均衡性,輸出電壓穩定一致,壽命長久;
結合室內定位系統,可以實現自主充電等功能擴展。
5) 農機農藝融合新模式
圍繞選擇性收獲,結合作物品種,栽培模式和機器人的交互方式,構建針對作物的智慧栽培系統
4、標準配置
配置:履帶式行走底盤、機械臂、雙目視覺系統、采摘機械手、遙控器
5、豐富配件(單獨選購)
超聲避障系統;視覺導航;室內定位系統;激光導航;語音交互;柔性采摘機械手;自動充電系統;遠程監控系統;可選擇輪式或軌道式行走底盤。
6、適應場景
標配型:現代農業園區或科技農業園區、標準化溫室種植、農業培訓類機構、農業嘉年華類活動。
增配型:科技場館、涉農大中專及以上院校及科研院所。(開放接口、教學大綱、教學課程、實驗教程等收費不含在標配價格中)





 通過認證
通過認證 














